¿El fin de los ataques al corazón? Un nanofármaco podría tener la solución
Estimula a los macrófagos, los
glóbulos blancos encargados de fagocitar los organismos extraños y
células muertas de nuestro organismo
Científicos norteamericanos han inventado una nanofármaco que "devora" las porciones de placa y las reduce, evitando el estrechamiento de las arterias, una de las causas que provocan los ataques al corazón, pudiendo convertirse, además, en un tratamiento potencial para la aterosclerosis.
Investigadores
de la Universidad Estatal de Michigan y de la Universidad de Stanford,
ambas en Estados Unidos, han creado una nanopartícula que actúa como un "Caballo de Troya" en nuestro organismo y que es capaz de reducir la acumulación de placa, que estrecha las arterias, y que puede llevar a sufrir un ataque al corazón.
En su estudio, publicado en la revista científica 'Nature Nanotechnology', los investigadores demuestran que gracias a su nanopartícula, logran estimular a los macrófagos,
encargados de fagocitar todos los cuerpos extraños que se introducen en
el organismo como las bacterias y sustancias de desecho de los tejidos,
para que se encarguen de aligerar de deshechos y células muertas de la placa que se aposenta en nuestras arterias.
Caballo de Troya
"Descubrimos que podíamos estimular los macrófagos para que comieran selectivamente células muertas y moribundas (estas células inflamatorias son células precursoras de la aterosclerosis) que son parte de la causa de los ataques cardíacos", señala a Phys.orgBryan Smith, profesor asociado de ingeniería biomédica en la Universidad Estatal de Michigan.
"Demostramos que estos nanofármacos eran capaces de buscar selectivamente y enviar un mensaje a las células necesarias",
añade Smith, que ha señalado que, tras los experimentos en laboratorio,
el siguiente paso es la traducción clínica de estos nanomateriales en
grandes modelos animales y pruebas de tejido humano.
Así viviremos más gracias a la inteligencia artificial
Grandes corporaciones
multinacionales han visto cómo el uso de la inteligencia artificial
puede dar grandes resultados en la prevención y la consecuente
longevidad.
La salud es una de las industrias
más boyantes del mundo. Empresas de todo el globo invierten ingentes
cantidades de dinero en buscar curas para todo tipo de enfermedades
(comunes en su mayoría) y algunas ya han visto a la inteligencia
artificial como una herramienta potentísima para la preciada longevidad.
Longevidad que en países como España o Japón, donde en 2019 murió un anciano con 113 años,
superan cada poco tiempo los récords cosechados. En otras latitudes,
también del mundo desarrollado, el tema no pinta muy bien y la esperanza
de vida está estancándose o incluso retrocediendo. Como por ejemplo en
Estados Unidos.
La nación más poderosa del mundo y la que más
se gasta en salud tiene también un gravísimo problema con el acceso a la
sanidad para millones de personas. Ciudadanos que tienen que hipotecar
su casa para poder recibir un tratamiento contra un cáncer y que en la acomodada Europa Occidental nos parece algo extraterrestre.
Arma más contra las enfermedades
Un estudio llevado a cabo por CB Insights
ha recogido los datos financieros de las empresas de salud y arroja que
han recaudado inversiones por valor de 1.600 millones de dólares solo
en el tercer trimestre del año 2019.
Gran parte de ellos corresponden con los 550
millones que Babylon Health ha conseguido, un trozo de pastel enorme
para la compañía londinense que utiliza una enorme base de datos con inteligencia artificial aplicada para encontrar patrones y realizar recomendaciones.
Entre el resto de las compañías del sector, según apunta SingularityHub,
encontramos nombres tan importantes como Insilico Medicine y
Juvenescence. La primera de ellas es una empresa de biotecnología con
sede en Maryland que utiliza la inteligencia artificial y el deep
learning para el descubrimiento de nuevas medicinas en ordenadores.
Algo muy similar hace Juvenescence pero con el
concepto de "ecosistema de la longevidad". Un concepto que tiene como
base proveer de buenas condiciones físicas y mentales a los pacientes
para que lleguen sanos a más edad. Lo hace a través de una red de compañías coordinadas por científicos y que cuenta con especialistas en la creación de medicinas, en el desarrollo de aplicaciones con inteligencia artificial y expertos en finanzas.
Negocio multimillonario
Relacionado íntimamente con la salud nos
encontramos con uno de los deseos más recurrentes de la humanidad: la
eterna juventud. Lo que antes significaba la peregrinación para tomar
agua de la fuente de un manantial, hoy tenemos centros de datos y aplicaciones en la nube.
¿Y dónde está el negocio? Donde hay dinero.
Las personas mayores son los que acaparan más dinero en sus cuentas
corrientes y son los únicos que están dispuestos a rascarse el bolsillo
(porque pueden) en tratamientos de miles de euros.
@franckinjapan en Unsplash
La inteligencia artificial también puede
significar un ahorro superlativo para las administraciones públicas.
Proyectos como el Digital Care Planning llevado a cabo en Reino Unido
usa un asistente de voz basado en IA para que los propios mayores y sus familias tengan una planificación y gestión de los cuidados que se requieran.
Y no solo con inteligencia artificial,
alrededor del día a día de los mayores hay decenas de servicios extras
en los que algunas empresas invierten miles de millones. Un buen ejemplo
podría ser Echo, una app que permite solicitar recetas en la sanidad
pública de UK y que sean proveídas directamente en la casa del mayor.
Son solo un par de empresas de todas las que recoge el Financial Timesy
que han quedado finalistas en los premios Innovating for Ageing. Pero
la industria de la longevidad tiene en las tecnológicas de Silicon
Valley y en la inteligencia artificial dos núcleos sobre los que
cimentar su negocio
El primer aviso de propagación del coronavirus llegó de un algoritmo de IA
El primer aviso que llegó acerca
de la propagación del coronavirus vino de la mano de un algoritmo de IA,
advirtiendo de su expansión por la ciudad de Wuhan.
Los logros que se están presenciando en el
campo de la Inteligencia Artificial referentes a la medicina y a la
tecnología son totalmente impresionantes. En parte gracias a su capacidad de detección anticipada de posibles problemas. Un buen ejemplo lo tenemos en la noticia que adelantan Wired y Quartz, ya que la primera voz de alarma acerca de la expansión del coronavirus se realizó gracias a un algoritmo de Inteligencia Artificial.
Mientras que el 9 de enero la Organización Mundial
de la salud notificó a la población el brote de coronavirus, los Centros
para el Control y la Prevención de Enfermedades de los Estados Unidos
se habían adelantado corriendo la voz el día 6 de enero. Una plataforma
de monitoreo de salud que usa algoritmos de Inteligencia Artificial
superó a ambos organismos, dando la voz de alarma el 31 de diciembre.
Esta startup llamada BlueDot afincada en
Toronto usa un algoritmo impulsado por IA que rastrea informs de
noticias en idiomas extranjeros. La plataforma de monitorización de
salud detectó el virus mucho antes de tiempo.
El algoritmo que "cazó" al coronavirus
Científico.
Ante un brote de tal magnitud que ha dejado cien
muertos en China, la velocidad de reacción es vital. Los funcionarios
chinos destinados a detectar enfermedades o desastres naturales no
suelen tener una alta eficacia en su trabajo. El problema es que los
funcionarios de las organizaciones ya mencionadas bdependen de ellos para sus propios monitoreos. Es por ello que la IA es una gran solución en estos casos.
Según cuenta Kamran Khan, fundador y CEO de BlueDot a Wired: "Sabemos
que no se puede confiar en que los gobiernos proporcionen información
de manera oportuna. Podemos recoger noticias de posibles brotes,
pequeños murmullos o foros y blogs de indicios en eventos inusuales". No
se usan datos de redes sociales, pero sí se utiliza el acceso a datos
de tránsito aéreo e informes acerca de otros brotes. Posteriormente,
profesionales epidemólogos revisan los resultados para que tengan
sentido desde un punto de vista científico.
Estos pueden predecir hacia dónde y cuándo se
dirigirán los residentes infectados, en este caso, con el coronavirus.
El algoritmo de BlueDot pronosticó correctamente que el
virus saltaría de Wuhan a Bangkok, Seúl, Taipei y Tokio en los dias
posteriores a la aparición inicial. Según explica la misma BlueDot,
dicho algoritmo "utiliza análisis de Big Data para rastrear y
anticipar la propagación de las enfermedades infecciosas más peligrosas
del mundo".
Arte sobre el 'machine learning'.
En caso de detectarse una infección, se envían alertas a los clientes de BlueDot y a los organismos públicos. La startup, que
recibió una inversión capital de 9.4 millones de dólares, tiene como
objetivo rastrear la información y alertar sobre ella en el menor tiempo
posible y a la mayor velocidad, punto clave en este tipo de casos.
Tanto es así, que tal y como informa Wired, sus creadores aseguran que
detectaron el virus Zika en 2014 6 meses antes de declararse la alerta sanitaria oficial.
La firma que ahora cuenta con 40 empleados (médicos y
programadores entre ellos) usa en su algoritmo procesamiento de
lenguaje natural y aprendizaje automático, es decir, machine learning, para examinar informes de noticias en 65 idiomas distintos. Khan asegura que "lo
que hemos hecho es usar el procesamiento del lenguaje natural y el
aprendizaje automático para entrenar este algoritmo para que pueda
reconocer si se trata de un brote de ántrax en Mongolia o una reunión de
la banda de heavy metal Anthrax".
Liberadas polillas transgénicas para acabar con una de las peores plagas del planeta
El primer
experimento en campo abierto con un insecto modificado ofrece resultados
prometedores para frenar una invasión que causa pérdidas de 4.000
millones de euros
Desde hace unos años, una empresa originada en los
laboratorios de la Universidad de Oxford crea seres vivos con
capacidades que hasta ahora no existían en la naturaleza. Su primera
criatura fue una variante del mosquito Aedes aegypti que
llevaba insertado en su genoma ADN de coral marino, bacterias, moscas y
polillas. El objetivo de esas modificaciones era sencillo: crear
mosquitos machos capaces de aparearse con las hembras para pasar a su
descendencia una herencia genética que garantiza que ninguno de sus
hijos sobrevivirá.
Así dicho puede parecer algo terrible, pero las hembras de Aedes aegypti son las responsables de transmitir enfermedades que afectan a millones de personas, como el dengue, el zika
y el chikungunya. En diferentes experimentos en Brasil, los creadores
de estos mosquitos diseñados para eliminar a su propia estirpe
demostraron que reducen la incidencia del dengue hasta en un 90%.
La compañía, Oxitec, ya está probando en Brasil una segunda generación
de mosquitos transgénicos que producen solo machos; incapaces de picar y
de transmitir enfermedades. También está desarrollando una nueva
variante para intentar esterilizar al mosquito que transmite la malaria,
una enfermedad que sufren más de 200 millones de personas en todo el
mundo y que cada año mata a más de 400.000, la mayoría niños.
Hoy se publican los resultados del primer experimento en
campo abierto con otra de las creaciones de esta compañía
biotecnológica. Se trata de una variante de la polilla Plutella xylostella que es una de las peores plagas agrícolas del mundo.
Las larvas de este insecto se alimentan de cultivos como el brécol, el
repollo o la coliflor y causan cada año pérdidas de unos 4.000 millones
de euros. Lo peor de esta polilla es que se ha vuelto resistente a la
mayoría de los insecticidas.
“Este insecto es el líder mundial en resistencia a los
insecticidas”, explica Tony Shelton, entomólogo de la Universidad de
Cornell (EE UU). “Esta es una de las peores plagas agrícolas de todo el
mundo especialmente en zonas cálidas, como el sur de EE UU, Asia,
incluidas China, India y Tailandia, así como España e Italia”, resalta.
Larvas de la polilla 'xylostella' devorando hojas de repollo.
Aquí es donde entra en juego la polilla OX4318L, una
variante modificada cuyo genoma lleva pequeños fragmentos sintéticos
inspirados en los de otros organismos, incluidos los ya mencionados más
otros nuevos, como el virus del herpes. Estas modificaciones hacen que
los machos transgénicos les pasen a las hembras un legado genético que
las hace adictas a la tetraciclina, un antibiótico. Sin ese compuesto
las larvas mueren a los pocos días. Este truco permite a los
investigadores criar en el laboratorio generaciones de la polilla usando
ese antibiótico y les asegura de que toda la progenie morirá en los
campos sin causar daños.
El equipo de Shelton junto a expertos de Oxitec ha
realizado la primera suelta de estas polillas modificadas que se ha
hecho en campo abierto: un cultivo de repollos debidamente aislado en
Geneva, en el estado de Nueva York. Los resultados, publicados hoy en Frontiers in Bioengineering and Biotechnology,
demuestran que los machos modificados genéticamente se comportan igual
que los salvajes y que se aparean con las hembras con toda normalidad.
Los investigadores liberaron casi 10.000 polillas salvajes y
otras 10.000 modificadas, lo que ha servido para recapturar algunas de
ellas después de unos días con trampas que despiden feromonas. El
trabajo muestra que la mayoría de los insectos apenas viajan unas
decenas de metros desde su punto de suelta. Ningún ejemplar transgénico
apareció en las trampas situadas fuera del campo experimental, un buen
dato en relación con la seguridad para un futuro uso comercial.
“Estudios previos hechos en invernaderos han demostrado que las polillas
transgénicas reducen drásticamente esta plaga en apenas dos
generaciones [un mes]”, explica Shelton. “Creo que va a haber varias
formas de usar esta tecnología, la primera, anteponerse a la plaga y
soltar polillas modificadas de forma profiláctica y la segunda, liberar
una población más grande de insectos modificados para eliminar una plaga
que ya está asentada”, detalla.
Esta táctica no es completamente nueva. Desde los años 50
se han creado poblaciones enteras de mosquitos estériles para acabar con
plagas, pero se hace bombardeando a los machos con radiación. Esta
táctica permitió eliminar el gusano barrenador del ganado en América del
Norte, México y zonas de África. “Lo malo de esta táctica es que es
como pegarles a los machos con un martillo en la cabeza, les vuelve
menos competentes que los machos salvajes”, explica Shelton, que añade
que la modificación genética es mucho más “específica” y permite además
usar menos insecticidas, lo que tiene beneficios ambientales.
“Nuestro objetivo ahora es hacer más sueltas experimentales
en cultivos para comprobar que la medida es segura y que funciona”,
explica Neil Morrison, jefe de programas agrícolas de Oxitec y coautor
del estudio. “Creemos que esta puede ser una nueva herramienta para
evitar estas plagas y evitar la aparición de especies resistentes a
insecticidas”, resalta. La polilla empleada en EE UU sería solo la
primera de sus criaturas dedicadas a la extinción de pestes, a la que
luego seguirían otras especies, como la mosca mediterránea de la fruta o
la del olivo, que la empresa ya intentó probar en un campo español en
2015, aunque el experimento no llegó a llevarse a cabo, explica
Morrison. “Aún somos una empresa pequeña y tenemos que ir paso a paso,
con lo que ese proyecto por ahora debe esperar”, explica.
Organizaciones ecologistas se oponen a este tipo de
experimentos. Argumentan que puede contaminar y arruinar la
certificación de los cultivos orgánicos adyacentes. También consideran
que se debería demostrar que las larvas muertas de esta polilla son
inofensivas para los animales o personas que se las puedan comer.
La entomóloga Dolors Piulachs opina que es “un estudio muy
completo que demuestra que sería efectivo como medida de control de
plagas", aunque sería solo un arma más para el arsenal y no funcionará
con todas las plagas. Esta investigadora del Instituto de Biología
Evolutiva (CSIC-UPF) piensa que “no hay posibilidad de que los genes de
la especie modificada permanezcan presentes, pues todas las hembras
mueren”. “Cualquier animal que se coma a una de las larvas muertas o a
un mosquito macho no tendría ningún problema pues el ADN quedaría
degradado en el sistema digestivo”, resalta. “Hay que recordar que no se
trata aquí de erradicar una especie, pues siempre quedarán ejemplares
salvajes en algún rincón, solo se trata de sacarlos de los cultivos,
porque lo más importante es que la gente pueda comer y que se usen menos
pesticidas”, resalta. “El único problema que puede tener esta táctica
es que al reducir o eliminar una especie aparezca otra plaga que
aproveche el hueco”, añade.
Dos expertos nos hablan de los variados mecanismos epigenéticos que
existen en la naturaleza y de su papel a la hora de favorecer cambios en
una especie.
Edith Heard es directora
general del Laboratorio Europeo de Biología Molecular (EMBL), en
Heidelberg, y catedrática de epigenética y memoria celular en el Colegio
de Francia, en París. Vincent Colot es director de investigación del
Centro Nacional de Investigación Científica de Francia y dirige el Grupo
de Dinámica de los Genomas y Variación Epigenética en la Escuela Normal
Superior de París. [JERÔME BRÉBION, INSTITUTO CURIE (E. Heard); PATRICK ALLARD, REA (V. Colot)]
En síntesis
El ambiente puede
influir en la epigenética de un organismo, el conjunto de reacciones y
mecanismos que regulan la actividad de los genes sin alterar la
secuencia del ADN.
Dos expertos hablan de su experiencia y la de otros grupos en esta
materia, en especial de los mecanimos epigenéticos que se han observado
en plantas y animales.
Explican varios de ellos, como la metillación del ADN, la
organización tridimensional de la cromatina o el control que ejercen los
transposones sobre el genoma, y destacan su contribución a la hora de
fijar mutaciones en una especie.
La epigenética engloba todos
los procesos de regulación de la expresión de los genes y determina, en
última instancia, el modo en que se desarrolla un órgano o una función
del cuerpo. En los últimos años se están descubriendo una gran variedad
de mecanismos epigenéticos. Al mantener bajo control un poderoso
reservorio de variaciones en el genoma, podrían ejercer un efecto
importante dentro de una especie. Edith Heard, directora del Laboratorio
Europeo de Biología Molecular (EMBL), y Vincent Colot, de la Escuela
Normal Superior de París, nos explican en la siguiente entrevista cómo
se ve afectado ese control por los cambios que se producen en el
ambiente.
¿Cómo definirían ustedes la epigenética hoy en día?
Edith Heard: La definición sobre la que se basa mi
trabajo surge de las investigaciones que el británico Robin Holliday y
el estadounidense Arthur Riggs llevaron a cabo en los años setenta del
siglo xx: la epigenética es el conjunto de cambios de expresión de los
genes que se transmiten a lo largo de las divisiones celulares o a
través de las generaciones y que no implican ningún cambio de la
secuencia del ADN. No obstante, la definición de Conrad Waddington ha
retomado fuerza al cabo de unos veinte años. En 1942, este biólogo
británico quiso acercar dos dominios, la genética y la embriología, con
el objeto de establecer un lazo entre el genotipo (el patrimonio
hereditario de un individuo, del que se encargan los genes) y el
fenotipo (los caracteres observables). En esa época, no se sabía de qué
estaban hechos los genes y Waddington propuso que se denominara
epigenética al estudio de los mecanismos del desarrollo mediante los
cuales los genes determinan los caracteres. Esta definición ha tomado un
sentido más general hoy en día, a medida que nos vamos interesando por
las variaciones más o menos grandes de los fenotipos que, para un mismo
genotipo, pueden engendrar los diferentes entornos.
Vincent Colot:
Sí, la definición de Waddington prevalece en nuestros días: para
resumirla, engloba todos los procesos de regulación de la expresión
génica, tanto en el desarrollo como en respuesta a las señales del
entorno. Se sabe que, en los eucariotas (los organismos cuyas células
tienen núcleo), esta regulación hace que intervengan numerosos
mecanismos que actúan sobre la cromatina (la estructura compacta que
forman dentro del núcleo el ADN y las proteínas de tipo histona
alrededor de las cuales se enrolla). Por mi parte, como Edith, lo que me
interesa son los mecanismos de control que conducen a una «memoria» de
los estados de expresión de los genes a lo largo de las divisiones
celulares o de las generaciones, y sus consecuencias.
Investigadores españoles descubren cómo frenar el cáncer de cerebro más mortal
Han
hallado que la proteína TAU, relacionada con diversas patologías
degenerativas en el cerebro, está presente en las células de los gliomas
con una función protectora
Investigadores españoles han descubierto una conexión entre los gliomas, un tipo de cáncer cerebral muy agresivo, y las enfermedades neurodegenerativas. En concreto, han hallado que la proteína TAU,
que tradicionalmente se ha relacionado con diversas patologías
degenerativas en el cerebro, está presente en las células de los gliomas
con una función protectora. Los autores del estudio destacan que el
hallazgo supone un punto de partida muy importante para el diseño de nuevas estrategias terapéuticas en este tipo de cáncer que, además, es resistente a quimioterapia y radioterapia.
El trabajo lo han llevado a cabo científicos de la Unidad Funcional
de Investigación de Enfermedades Crónicas del Instituto de Salud Carlos
III (ISCIII), en colaboración con investigadores el Centro de
Investigación Biomédica en Red de Enfermedades Neurodegenerativas
(CIBERNED), de la Asociación Española de contra el Cáncer (AECC), del
Centro de Biología Molecular del CSIC y del Hospital 12 de Octubre,
integrados en el Instituto de Investigación Sanitaria i+12, de Madrid.
El estudio, publicado en «Science Translational Medicine», demuestra
que la proteína TAU, relacionada con diversas patologías degenerativas
en el cerebro, está presente en las células de los gliomas. En estos
tumores, TAU regula la capacidad que tienen las células tumorales para
promover la formación de nuevos vasos sanguíneos, que son fundamentales
para el crecimiento de este tipo de cáncer.
La investigación permite conocer mejor los gliomas, un tipo de
cáncer poco frecuente pero con una de las tasas de mortalidad más
elevadas, que representa alrededor del 60% de las neoplasias cerebrales.
Estos tumores deben su nombre a su similitud con las células de glía,
que están presentes en el sistema nervioso central y que dan soporte a
las neuronas. Además, los pacientes que son diagnosticados con los gliomas más agresivos tienen un índice de supervivencia muy bajo, de en torno a 15 meses.
Además, este trabajo abre una nueva vía para la búsqueda de
tratamientos que puedan ser utilizados para controlar este tipo de
tumores, los más agresiva dentro de los tumores cerebrales. El trabajo
se basa en la caracterización de muestras tumorales de pacientes con
gliomas, así como en el estudio de diversos modelos preclínicos, tanto
con cultivo de células tumorales como con modelos animales.
Función protectora
Los resultados muestran que la proteína TAU está presente en los gliomas menos agresivos
y que su expresión se pierde a medida que aumenta el grado de
malignidad del tumor. Por ello, los datos sugieren que TAU podría servir
también como un marcador de buen pronóstico para los pacientes.
Los investigadores también han demostrado que TAU reprime la capacidad que tienen las células de glioma
de promover la formación de nuevos vasos sanguíneos. Estos vasos
sanguíneos tumorales son diferentes de los vasos normales en el cerebro y
son fundamentales para proveer de nutrientes a las células del glioma,
favoreciendo un crecimiento más agresivo. De hecho, los resultados
demuestran que existe una correlación inversa entre la presencia de TAU
en los tumores y la cantidad de vasos sanguíneos «aberrantes» en los
tumores.
Otra conclusión relevante del estudio es que la función de la proteína TAU en los gliomas se puede imitar con compuestos derivados del taxol, que ya se utilizan como agentes antitumorales en
otros tumores y que producen un efecto aditivo con la quimioterapia
convencional de los gliomas. Este hallazgo podría abrir la puerta a nuevas terapias basadas en el empleo de estos compuestos, o incluso en el uso de fármacos que hubieran sido inicialmente diseñados para pacientes con enfermedades neurodegenerativas.
En este sentido, el trabajo también podría tener importantes
implicaciones para caracterizar nuevas funciones de la proteína TAU en
dichas patologías degenerativas, donde ya existen evidencias de la
relevancia que podría tener la vasculatura cerebral de los pacientes en
la evolución de la enfermedad. El proyecto ha contado con financiación
del Ministerio de Economía y Competitividad, de la Asociación Española
contra el Cáncer y del NIH (National Institutes of Health). -
-https://www.abc.es/salud/enfermedades/abci-investigadores-espanoles-descubren-como-frenar-cancer-cerebro-mas-mortal-202001231029_noticia.html#vca=rrss&vmc=abc-es&vso=fb&vli=cm-general&_tcode=YW5uMG0y
¿Qué es un robot? ¿Qué es un material inteligente? ¿Cómo
pueden tener un impacto tan importante en nuestras vidas futuras? En el
presente artículo analizaremos el verdadero potencial de la robótica y,
en particular, de la robótica blanda-inteligente. Estas tecnologías van a
dar un vuelco total a nuestra percepción de qué es un robot y cómo nos
puede ayudar en el mundo en el que vivimos. En lugar de ver los robots
como grandes máquinas rígidas y robustas, podemos pensar en los robots
del futuro como organismos artificiales robóticos que cuentan con
propiedades que imitan y amplían en gran medida las capacidades de los
organismos naturales. Las propiedades únicas de blandura y elasticidad
de estas máquinas las hacen muy adecuadas para interacciones con
elementos muy delicados, como el cuerpo humano. Además, abordaremos
cuestiones sobre la robótica emergente que todavía no han sido objeto de
reflexión, como la biodegradabilidad y la transducción de energía
regenerativa. Estas nuevas tecnologías impulsarán el avance de la
robótica, pero ignoramos hacia dónde, igual que se desconoce la forma
exacta de los robots del futuro. Sin embargo, sí que podemos vislumbrar
el impacto futuro de la robótica en el ser humano.
El siglo XIX
estuvo marcado por la aceleración y la generalización de los procesos
industriales. Al principio del siglo, la Revolución Industrial estaba a
mitad de su desarrollo, mientras que en sus postrimerías habíamos
desarrollado el coche y estábamos a punto de probar el vuelo con motor.
El impacto en la vidas de los humanos fue enorme; se reescribieron las
normas sociales y económicas que gobernaban el transporte, la sanidad,
la manufactura, los entornos de trabajo y la vida doméstica. En el siglo
xx,
este proceso se repitió con la Revolución Tecnológica, pero a un ritmo
mucho más veloz. La tecnología se desplazó del laboratorio y el
instituto de investigación al hogar. El papel de motor impulsor recaía
en los nuevos reinos de la electrónica, las telecomunicaciones, la
automatización y la computación, en lugar de los sistemas mecánicos del
siglo anterior. En los primeros años del siglo xx
casi no había teléfonos, pero en los albores del nuevo milenio los
móviles eran moneda común; cien años antes apenas se había oído hablar
de computadoras, que ya han adquirido una presencia universal. Hoy
estamos a las puertas de un nuevo cambio tecnológico de la misma
relevancia: la Revolución Robótica. Esta revolución convertirá el siglo
XIX en un momento crucial en la historia. Es más, tendrá un impacto irrevocable en nuestras vidas y en las vidas futuras.
kk
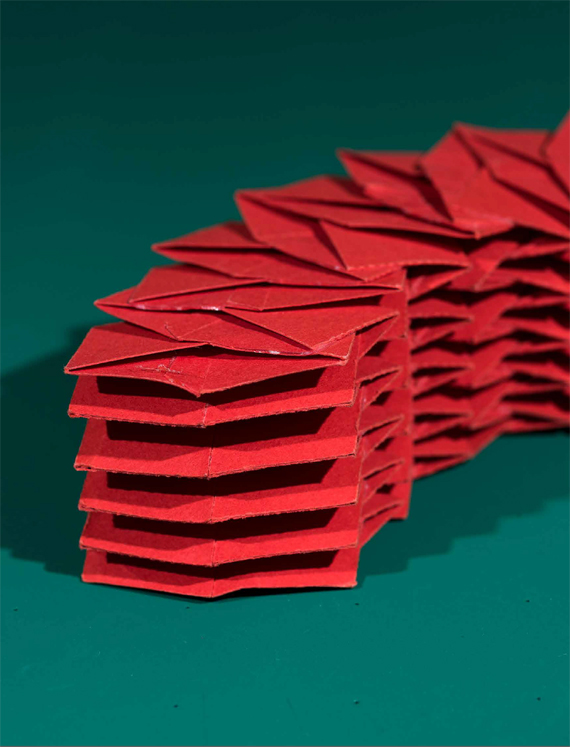
El origami podría dar una vuelta de tuerca a la ingeniería estructural,
con aplicaciones que van desde el transporte y la construcción hasta el
espacio exterior. Esta estructura de origami está compuesta de 12 tubos
interconectados que, una vez plegados, pueden transportarse con
facilidad
En
todo caso, ¿qué es la Revolución Robótica y qué comportará en realidad?
Para responder a esta pregunta debemos analizar qué es un robot, qué
nuevas tecnologías están surgiendo y cambiarán su definición y cómo
influirán en la vida de las personas y en la salud del planeta. Si
revisamos brevemente las dos revoluciones anteriores, la industrial y la
tecnológica, observamos que se caracterizaron por el desarrollo de dos
conceptos muy dispares: el mecánico y el eléctrico. La Revolución
Robótica, por su parte, explota una fusión entre los sistemas mecánicos,
los sistemas eléctricos y los nuevos métodos de computación e
inteligencia. Mediante la combinación de lo mejor de las múltiples
tecnologías existentes y las nuevas se está desarrollando y se
desarrollará un abanico bastante asombroso de robots y sistemas
robóticos.
Robots: de amenaza en la Guerra Fría a futuros salvadores
A menudo se define
un «robot» por sus capacidades: es una máquina que puede efectuar series
complejas de acciones y, en especial, que se puede programar por
ordenador. Se trata de una definición útil que engloba una gran
proporción de los robots convencionales del tipo que podemos ver en las
películas de ciencia ficción. Esta definición y el peso de las
percepciones culturales consolidadas sobre qué es un robot influyen en
nuestra visión de qué podría ser un robot. El mejor modo de entenderlo
es analizar las actitudes culturales frente a los robots en todo el
mundo. Si escribimos «robot» en la versión en lengua inglesa del
buscador Google, obtenemos imágenes que casi exclusivamente son
humanoides, brillantes, de estructura rígida y exentos de emoción (véase
Figura 1a). Hay también algunos robots de tipo militar, de aspecto más
bien oscuro y agresivo. Estos resultados están sesgados
significativamente por el corpus cultural que Google utiliza para
encontrar estas opiniones. Si efectuamos la misma búsqueda en la web de
Google en lengua japonesa (introduciendo ロボット,
el término japonés para robot), obtenemos un conjunto de resultados
distintos, como se muestra en la Figura 1b. En este caso, los resultados
presentan unos robots mucho más amigables y accesibles, con menos
rasgos humanoides y apariencias que recuerdan a dibujos animados o
animales. La causa de tal diferencia es histórica y procede del marco
cultural de posguerra en el cual se inscribían las nuevas tecnologías y,
en particular, la robótica, durante la Guerra Fría. Los robots se
convirtieron en un ejemplo de amenaza alienígena. Por el contrario,
Japón no se vio afectado por estos prejuicios y, por consiguiente, los
robots se consideraban entidades benignas. Estas diferencias históricas y
culturales en el desarrollo de la robótica tienen consecuencias
profundas: la robótica occidental está fuertemente entretejida con la
investigación militar, mientras que la robótica oriental se centra en la
asistencia, el cuidado sanitario y la industria. Estos antecedentes
culturales perpetúan también nuestras visiones sesgadas sobre qué
aspecto debería tener un robot y cómo se tendría que comportar.>
Ahora
tenemos la oportunidad de romper con estas convenciones. No es necesario
que un robot sea humanoide, que tenga miembros, que camine ni que
hable. En lugar de ello, cabe una interpretación mucho más amplia de qué
es un robot. Los límites entre los materiales inteligentes, la
inteligencia artificial, la personificación, la biología y la robótica
se están volviendo difusos: he aquí la verdadera vía por la cual la
robótica influiría en la raza humana en los próximos veinte a cuarenta
años. ¡Y menudo impacto cabe esperar! Desde robots que puedan supervisar
y reparar el entorno natural hasta nanorrobots para controlar y
eliminar el cáncer; desde robots que liderarán la colonización de
planetas hasta robots de compañía que nos salvarán de la soledad en la
edad avanzada. Ni en nuestra sociedad ni en nuestras vidas habrá nada
ajeno a la influencia de la robótica del futuro. En resumen, serán
ubicuos.
Hacia unos organismos robóticos ubicuos
La
naturaleza ha encontrado vías de explotar las diferencias en las
condiciones medioambientales y amoldarse a ellas. A través de la
adaptación evolutiva, se han desarrollado un sinfín de organismos que
operan y progresan en condiciones diversas y a menudo extremas. Por
ejemplo, el tardígrado (Schokraie et al.
2012) es capaz de sobrevivir a presiones superiores a las existentes en
los océanos más profundos y en el espacio, puede soportar temperaturas
desde 1 K (-272 °C) a 420 K (150 °C) y puede vivir treinta años sin
alimentos. Asimismo, los organismos a menudo operan en simbiosis con
otros. Por ejemplo, el humano medio tiene cerca de 30 billones de
células, pero contiene cerca de 40 billones de bacterias (Sender et al. 2016). Los organismos naturales abarcan tamaños que van del de las bacterias independientes más pequeñas, las Pelagibacter ubique,
de cerca de 0,5 µm de longitud, al de la ballena azul, de alrededor de
30 metros de largo. ¡Un rango de longitudes de siete órdenes de
magnitud, por aproximadamente 15 órdenes de magnitud en volumen! Lo que
muestran estos datos asombrosos es que, si la naturaleza puede usar los
mismos componentes biológicos (ADN, aminoácidos, etcétera) para un
abanico tan asombroso de organismos, nosotros también podemos emplear
nuestros componentes robóticos para cubrir un espectro mucho mayor de
entornos y aplicaciones que los actuales. De este modo, podríamos
igualar la ubicuidad de los organismos naturales.
Para
conseguir la ubicuidad robótica no solo debemos estudiar y reproducir
los hitos de la naturaleza, también ir más allá con un desarrollo más
veloz (¡sin duda, menos dilatado en el tiempo que la propia evolución!) y
más tecnologías generales y adaptables. Otro modo de ver los robots
futuros es considerarlos organismos artificiales.
En lugar de un robot convencional que se puede descomponer entre los
apartados mecánico, eléctrico e informático, podemos pensar en un robot
en términos de sus homólogos biológicos, y con tres componentes
principales: un cuerpo, un cerebro y un estómago. En los organismos
biológicos, la energía es convertida en el estómago y se distribuye por
todo el cuerpo para alimentar los músculos y el cerebro, que controla el
organismo. Por lo tanto, se da una equivalencia funcional entre el
organismo robótico y el organismo natural: el cerebro equivale a la
computadora o sistema de control, el cuerpo a la estructura mecánica del
robot, y el estómago a la fuente de energía del robot, ya se trate de
una batería, una placa solar o cualquier otra fuente de energía. La
ventaja del paradigma del organismo artificial es que nos alienta a
explotar todas las características de los organismos biológicos e,
incluso, ir más allá. Estas características comprenden cualidades en
gran medida omitidas por la investigación robótica actual, como el
funcionamiento en condiciones variables y duras, la integración en
entornos medioambientales benignos, la reproducción, la muerte y la
descomposición. Todas ellas son esenciales para el desarrollo de unos
organismos robóticos ubicuos.
Este
objetivo solo es factible mediante una investigación concertada en las
áreas de los materiales inteligentes, la biología sintética, la
inteligencia artificial y la adaptación. En este capítulo nos
centraremos en el desarrollo de materiales inteligentes novedosos
destinados a la robótica, pero también entenderemos por qué el
desarrollo de materiales no puede aislarse de otras áreas de
investigación muy necesarias.
Materiales inteligentes para robots blandos
Un
material inteligente es aquel que muestra un efecto observable en una
de sus facetas cuando es estimulado desde otra. Quedan cubiertas todas
las facetas, incluida la mecánica, la eléctrica, la química, la óptica,
la térmica, etcétera. Por ejemplo, un material termocromático muestra un
cambio de color cuando se calienta, mientras que un polímero
electroactivo genera una prestación mecánica (es decir, se mueve) cuando
recibe una estimulación eléctrica (Bar-Cohen 2004). Los materiales
inteligentes pueden añadir nuevas capacidades a la robótica y,
especialmente, a los organismos artificiales. ¿Necesitamos un robot que
pueda detectar los productos químicos? Podemos utilizar un material
inteligente que cambie de propiedades eléctricas cuando esté expuesto al
producto químico en cuestión. ¿Necesitamos un dispositivo robótico que
se pueda implantar en una persona pero que se degrade hasta desaparecer
cuando haya cumplido su función? Podemos emplear polímeros
biodegradables, biocompatibles y de disolución selectiva. La
«inteligencia» de los materiales inteligentes se puede incluso
cuantificar. Su coeficiente de inteligencia (CI) se puede calcular
evaluando su capacidad de respuesta, agilidad y complejidad (por
ejemplo, el número de cambios de fase que pueden soportar) (Cao et al. 1999). Si combinamos múltiples materiales inteligentes en un robot podemos incrementar en gran medida el CI de su cuerpo.
De
izquierda a derecha: el protozoo Euglena flagellate, el robusto
tardígrado Milnesium tardigradum y el pulpo mimético Thaumoctopus
mimicus
Los materiales inteligentes pueden
ser duros, como los piezomateriales (Curie y Curie 1881); flexibles,
como las aleaciones con memoria de forma (Wu y Wayman 1987); blandos,
como los elastómeros dieléctricos (Pelrine et al. 2000); e incluso fluidos, como los ferrofluidos (Albrecht et al.1997)
y los fluidos electrorreológicos (Winslow 1949). Es una muestra de la
gran facilidad y variedad de estos materiales, que cubren en gran medida
el mismo conjunto de propiedades físicas (rigidez, elasticidad y
viscosidad) que el tejido biológico. Una característica importante de
casi todos los organismos biológicos y, sin duda, de todos los animales,
es que dependen de la blandura. Ningún animal, ya sea grande o pequeño,
insecto o mamífero, reptil o pez, es totalmente duro. Incluso los
insectos, dotados de exoesqueletos rígidos, son blandos y adaptables por
dentro. Es un fenómeno directamente relacionado con la dependencia de
la naturaleza de la actuación (la generación de movimiento y fuerzas) de
tejido blando como el muscular. La humilde cucaracha es un excelente
ejemplo de ello: aunque cuente con un cuerpo muy rígido y robusto, sus
miembros están articulados mediante tejido muscular blando (Jahromi y
Atwood 1969). Si observamos con detenimiento el reino animal, podemos
encontrar muchos organismos que son blandos casi por completo. Por
ejemplo, los gusanos, las babosas, los moluscos, los cefalópodos y
algunas algas pequeñas como la euglena. Sacan partido a su blandura para
doblarse, retorcerse y estrujarse a fin de cambiar de forma, esconderse
y desplazarse. Sin ir más lejos, un pulpo, para escapar, puede
encogerse hasta pasar por una abertura de menos de una décima parte del
diámetro de su cuerpo (Mather 2006). A pesar de su blandura, puede
también generar fuerzas suficientes para aplastar objetos y otros
organismos, al tiempo que goza de la destreza suficiente para abrir la
tapa a rosca de un frasco (BBC 2003). Estas deformaciones corporales tan
notables son posibles no solo gracias a los tejidos musculares blandos,
también a la explotación de principios hidráulicos e hidrostáticos que
permiten un cambio controlable de la rigidez (Kier y Smith 1985).
En
la naturaleza abundan los ejemplos de qué se puede hacer con los
materiales blandos, de modo que nos interesa explotar dichas
posibilidades en nuestros robots. Pasemos ahora a abordar algunas de las
tecnologías con el potencial para brindarnos esta capacidad. Las
tecnologías robóticas de vanguardia se pueden dividir en tres grupos: 1)
sistemas blandos hidráulicos y neumáticos, 2) materiales inteligentes
como sensores y actuadores y 3) materiales que cambian de rigidez. En
fechas recientes, la robótica blanda ha cobrado protagonismo gracias al
resurgir de los sistemas de impulso por fluido combinado con una mayor
comprensión de la modelización de materiales elastoméricos. Aunque se ha
hecho un gran trabajo en el perfeccionamiento de los actuadores
neumáticos de goma con refuerzo trenzado (Meller et al. 2014), este discreto enfoque basado en componentes limita su ámbito de aplicación.
Se evidencia un mejor enfoque en la clase pneunet (red neumática) de actuadores robóticos (Ilievski et al. 2011) y su evolución hacia los dispositivos blandos ponibles (Polygerinos et al. 2015) y los robots robustos (Tolley et al. 2014). Las pneunetsson
estructuras neumáticas multicámara y de una sola pieza, formadas por
elastómeros de poliuretano y silicona. Por desgracia, los sistemas
hidráulicos y neumáticos están enormemente limitados por su necesidad de
bombas externas, depósitos de aire o fluido y válvulas. Estos
mecanismos añaden un volumen y un peso considerable al robot y reducen
su blandura.
Un
enfoque mucho mejor consiste en buscar sistemas que no dependan de
estos aparatosos elementos auxiliares. Los sensores y actuadores de
materiales inteligentes tienen el potencial de permitirlo mediante la
sustitución de la presión del fluido por efectos eléctricos, térmicos o
fotónicos. Por ejemplo, los polímeros electroactivos (PEA) convierten la
energía eléctrica en deformación mecánica. Las Figuras 2 y 3 muestran
dos formas comunes de PEA: el actuador de elastómero dieléctrico (AED)
(Pelrine et al.
2000) y el actuador de polímero iónico (API) (Shahinpoor y Kim 2001).
El AED está compuesto de una capa central de elastómero de alta
constante dieléctrica, encerrada entre dos capas elásticas de electrodo.
Cuando un campo eléctrico de gran magnitud (del orden de 1 MV/m) se
aplica a la estructura compuesta, se acumulan cargas opuestas en los dos
electrodos y estas se ven atraídas por las fuerzas de Coulomb,
etiquetadas con σ
en la Figura 2. Estas inducen tensiones de Maxwell en el elastómero,
que hacen que se comprima entre los electrodos y se expanda en el plano,
etiquetado con ε
en la Figura 2. Dado que las fuerzas de Coulomb son inversamente
proporcionales a la separación entre cargas y que los electrodos se
expanden al actuar, lo que incrementa el área de acumulación de carga,
la tensión inducida en el actuador AED es proporcional al cuadrado del
campo eléctrico. Esto incentiva a reducir al máximo el grosor de la capa
de elastómero. Desgraciadamente, una capa más fina de elastómero hace
necesarias más capas para hacer nuestro robot, con la consiguiente mayor
probabilidad de un defecto de fabricación o una avería eléctrica. Dado
que los AED tienen una densidad de potencia cercana a la de los músculos
biológicos (Pelrine et al. 2000), son buenos candidatos para su desarrollo hacia organismos artificiales y dispositivos de asistencia ponibles.
Por otra parte, los actuadores de
polímero iónico son materiales inteligentes que funcionan de acuerdo con
un principio electromecánico distinto, como muestra la Figura 3. Los
API se fabrican a partir de una capa central conductora iónica, de nuevo
encerrada entre dos electrodos conductores. Sin embargo, a diferencia
de los AED, su campo eléctrico es mucho menor (1 kV/m) y, por lo tanto,
los electrodos deben tener más capacidad de conducción. Cuando se aplica
un campo eléctrico, los iones libres del conductor iónico se desplazan
hacia los electrodos, donde se acumulan. La elevada concentración de
iones en los electrodos hace que se expandan, dado que las cargas
iguales se repelen a causa de las fuerzas de Coulomb de la zona. Si los
cationes (+) y los iones (–) guardan diferencias significativas en
tamaño y carga, habrá una falta de correspondencia en la expansión de
los dos electrodos y el API se doblará. La ventaja del API es que
funciona con voltajes mucho menores que los AED, pero solamente puede
generar fuerzas menores. Un recién llegado al catálogo de materiales
inteligentes es el actuador de nailon bobinado (Haines et al.
2014). Se trata de un actuador térmico fabricado a partir de un único
filamento de nailon insertado en torsión y enrollado. Al calentarse, su
estructura se contrae. Pese a que el actuador de nailon tiene el
potencial de proporcionar dispositivos robóticos fiables y de bajo
coste, está condenado por su ciclo térmico. Al igual que con el resto de
actuadores térmicos, incluidas las aleaciones con memoria de forma
(AMF), es relativamente fácil calentar la estructura (y, de este modo,
hacer que se contraiga su filamento parecido a un músculo), pero es
mucho más complicado volver atrás y enfriar el dispositivo. En
consecuencia, la velocidad de ciclo de los actuadores de nailon (y de
los de AMF) es baja, de menos de 10 Hz. Por el contrario, los AED y API
se han probado a cientos de hercios y se ha mostrado que los AED podían
incluso funcionar como un altavoz (Keplinger et al. 2013).
La
última capacidad necesaria para fabricar el cuerpo de los organismos
robóticos blandos es el cambio de rigidez. Pese a que se puede conseguir
mediante la activación de músculos, como en los pulpos, existen varias
tecnologías de robótica blanda susceptibles de lograr la modulación de
la rigidez con independencia de la actuación. En este grupo de
tecnologías encontramos los polímeros con memoria de forma (PMF) y la
consolidación granular (jamming).
Los PMF son polímeros que experimentan una transición de fase
controlable y reversible desde un estado rígido y vidrioso a una forma
blanda y elástica (Lendlein et al.
2013). Los más común es que sean estimulados mediante calor, pero
algunos PMF efectúan su transición al recibir estímulos fotónicos o
eléctricos. Una propiedad destacable de los PMF es su capacidad de
«memorizar» un estado programado. De este modo se puede conseguir que un
robot PMF haga una transición de blando a duro y, una vez completada la
operación, lograr a su vez que regrese automáticamente a su forma
previa a la programación. Los PMF nos brindan también la interesante
posibilidad de combinarlos con actuadores estimulados por la misma
fuente de energía. Por ejemplo, un polímero con memoria de forma de
accionamiento térmico se puede combinar con un PMF térmico para
proporcionar una estructura compleja que comprenda la actuación, el
cambio de rigidez y la memoria en una sola unidad alimentada en
exclusiva por calor (Rossiter et al. 2014). La consolidación granular o jamming, al contrario que el cambio de fase de los PMF, es un mecanismo más mecánico (Amend et al.
2012). Se rellena con materiales granulares una cámara flexible, cuya
rigidez se puede controlar bombeando un fluido a su interior o
extrayéndolo. Cuando el aire se evacúa de la cámara, la presión
atmosférica debida al vacío del interior de la cámara hace que los
gránulos se compriman entre sí y se tornen rígidos. De este modo, se
puede fabricar una estructura cambiante de rigidez binaria blanda-dura.
Una estructura compuesta de este tipo resulta muy adecuada para
dispositivos de ayuda ponibles y robots de exploración.
Robots donde menos los esperamos
Después
de haber abordado las tecnologías que abrirán la puerta a una nueva
generación de robótica, pasamos a analizar el modo en que dichos robots
pueden aparecer en nuestra vida y cómo nos relacionaremos y viviremos
con ellos.
Pieles inteligentes
La
flexibilidad de la robótica blanda la hace ideal para la interacción
directa con el tejido biológico. Las interacciones blando-blando entre
un robot de este tipo y un ser humano son, por naturaleza, mucho más
seguras que la interfaz rígido-blando que imponen los robots rígidos
convencionales. Se ha trabajado mucho en los materiales inteligentes
para el contacto directo de piel contra piel y para la integración en la
piel humana, lo que incluye conexiones eléctricas y componentes
electrónicos (Kim et al.
2011). Una segunda piel robótica blanda de tipo funcional puede ofrecer
muchas ventajas inasequibles para un revestimiento convencional. Por
ejemplo, puede mimetizar la capacidad de cambiar de color de los
cefalópodos (Morin et al. 2012) o cambiar fluidos de lugar, como los peces teleósteos (Rossiter et al.
2012), y de ese modo regular la temperatura. El devenir natural de este
tipo de pieles radica en la fabricación de vendas inteligentes para
facilitar la curación de heridas y reducir la difusión de las bacterias
con resistencia microbiana, al limitar la necesidad de antibióticos. Por
supuesto, estas pieles pueden servir de ropa, pero todavía nos queda
lejos la aceptación social de segundas pieles como sustitutas de las
prendas de vestir convencionales. Por otra parte, si explotamos las
tecnologías de actuación blanda fibrosa como el actuador de bobina de
nailon y los compuestos de aleación-polímero con memoria de forma
(Rossiter et al.
2014), podremos tejer músculos artificiales en el interior de las
telas. Por consiguiente, nos brindan la posibilidad de crear ropa activa
y reactiva. Estas prendas inteligentes ofrecen también una nueva
facultad sin igual: dado que el material inteligente está en contacto
directo con la piel y que cuenta con capacidades de actuación, puede
aplicar a la piel una estimulación mecánica directa. De este modo,
podemos integrar la comunicación táctil en la ropa. Hay que tener en
cuenta que el canal de la comunicación táctil se ha quedado rezagado
respecto a los demás sentidos. Tomemos, como ejemplo, los smartphones
actuales: su elevado ancho de banda tanto para la reproducción de
imágenes como de sonido contrasta con unas capacidades de estimulación
táctil casi inexistentes. Con prendas de vestir con función táctil
podríamos generar sensaciones «afectivas»
naturales de tacto, lo que nos ofrecería un nuevo y revolucionario
canal de comunicación potencial. En lugar de un rudo motor vibrador
(como el empleado en los teléfonos móviles) podríamos acariciar, hacer
cosquillas o proporcionar otras sensaciones táctiles agradables (Knoop y
Rossiter ٢٠١٥).
Dispositivos de asistencia
Si
la ropa inteligente anteriormente citada fuera capaz de generar fuerzas
superiores, podría servir no solo para la comunicación, sino también
para la asistencia física. Una solución futura para las personas
debilitadas, discapacitadas o ancianas pueden ser las prendas de vestir
con asistencia de movimiento, que les devolverán la movilidad. Devolver
la movilidad puede tener un impacto considerable en la calidad de vida
del que lleva la ropa e incluso permitirle volver a la vida productiva,
con lo que se contribuiría a su vez a la economía en general. La
dificultad de esta propuesta es la densidad de potencia de las
tecnologías de actuación que contienen los dispositivos de asistencia.
Si el que se pone esa prenda sufre de debilidad, por ejemplo al haber
perdido masa muscular, necesitará un aumento de potencia significativo,
pero el peso necesario para lograrlo podría resultar contraproducente.
Por lo tanto, un dispositivo de asistencia debería ser lo más ligero y
confortable posible, con una actuación dotada de una densidad de
potencia significativamente superior a la de los músculos biológicos. En
la actualidad es algo que todavía no está al alcance de la tecnología
más avanzada. Llegado un momento, los dispositivos de asistencia
ponibles harán innecesarios los dispositivos de asistencia
convencionales. ¿Por qué usar una silla de ruedas si se puede volver a
caminar con unos pantalones impulsores basados en robótica blanda?
Dispositivos médicos
La biointegración que ejemplificaban los dispositivos ponibles descritos en el apartado anterior se puede llevar más allá, dentro del cuerpo.
Dado que la robótica blanda es tan adecuada para la interacción con
tejido biológico, no es descabellado imaginar que un dispositivo de este
tipo se pueda implantar en el cuerpo e interactuar físicamente con sus
estructuras internas. Por consiguiente, podríamos fabricar dispositivos
médicos implantables capaces de restaurar la funcionalidad de órganos y
estructuras enfermos o dañados. Pensemos, por ejemplo, en el tejido
blando canceroso que puede afectar a nuestros órganos, desde los
intestinos y la próstata hasta la laringe y la tráquea. Ante estas
enfermedades, el tratamiento típico implica la escisión quirúrgica del
cáncer y la gestión de las afecciones resultantes. Es posible que un
paciente con cáncer de laringe se someta a una laringectomía que después
le prive de la capacidad de hablar y le obligue a sufrir una
traqueotomía permanente. Mediante el desarrollo y la implantación de un
órgano robótico blando de sustitución podemos restaurar sus capacidades
funcionales y permitir que el paciente vuelva a hablar, tragar, toser y
disfrutar de la vida. Esta robótica blanda biointegrada se encuentra en
fase de desarrollo y se espera que llegue al ámbito clínico en los
próximos diez a quince años.
Robots biodegradables y ecológicos
Es
natural ampliar el concepto de biointegración desde el entorno
doméstico (antropocéntrico) hasta el entorno natural. Hoy en día, los
robots que operan en el entorno natural se ven limitados por las
tecnologías mismas en que se basan. Dado que están hechos de materiales
rígidos, complejos y dañinos para el medio ambiente, deben ser sometidos
a un control constante. Cuando alcanzan el final de sus vidas
productivas, hay que recuperarlos y procesarlos como residuos. En
cambio, si pudiéramos fabricar robots totalmente respetuosos con el
medioambiente, podríamos despreocuparnos más de su recuperación una vez
que ya no sirvieran. Esto es ya posible gracias al desarrollo de la
robótica blanda biodegradable (Rossiter et al.
2016). Sacando partido a materiales inteligentes que no solo son
seguros para el medioambiente durante su vida útil, sino que también se
degradan de un modo seguro hasta su total descomposición en la
naturaleza, podemos crear robots que vivan, mueran y desaparezcan sin
daños medioambientales. Cambia así nuestro modo de desplegar robots en
el entorno natural: en lugar de tener que vigilar y recuperar un número
reducido de robots dañinos para el medioambiente, podemos desplegar
miles o incluso millones de robots con la tranquilidad de saber que se
degradarán sin peligro en la naturaleza, sin causar daño alguno. Una
evolución natural de los robots biodegradables consiste en los robots
comestibles. En este caso, un robot comestible se podría ingerir,
trabajar durante un día dentro del cuerpo y, a continuación, ser
procesado por el organismo. Nos brindaría, pues, un nuevo método para
administrar tratamientos y medicamentos en el interior del cuerpo de un
modo controlado y cómodo.
Robots blandos inteligentes
Todos
los actuadores blandos descritos en apartados anteriores ejercen de
transductores. Es decir, convierten una forma de energía en otra. A
menudo este efecto de transducción se puede invertir. Por ejemplo, los
actuadores de elastómeros dieléctricos se pueden reconfigurar para
convertirse en generadores de elastómeros dieléctricos (Jin et al.
2011). En un generador de este tipo la membrana de elastómero blando es
deformada mecánicamente, lo que genera electricidad. Ahora podemos
combinar este efecto generador con la robótica ponible que hemos
descrito en apartados anteriores. Un dispositivo ponible
actuador-generador puede, por ejemplo, proporcionar más potencia al
subir una cuesta y, una vez que el usuario haya alcanzado la cima,
generar electricidad a partir del movimiento del cuerpo, mientras el
usuario camina tranquilamente cuesta abajo. Este tipo de «frenada
regenerativa» de los robots blandos es solo un ejemplo del potencial de
la conversión bidireccional de energía en este tipo de robótica. Estos
materiales muestran dos componentes de computación: de entrada y de
salida. Al combinar estas dos capacidades con las propiedades de
respuesta a la tensión inherentes a los citados materiales, cabe la
posibilidad de realizar robots que puedan computar con sus cuerpos. Se
trata de un paradigma nuevo y potente, a menudo descrito en términos más
generales como inteligencia incorporada o computación morfológica
(Pfeifer y Gómez 2009). Por ejemplo, mediante la computación morfológica
podemos otorgar un control de bajo nivel al cuerpo del robot blando.
Por lo tanto, ¿necesitamos que nuestro organismo robótico blando tenga
cerebro? En muchos robots blandos sencillos el cerebro puede estar de
más, puesto que su cuerpo mismo lleva a cabo toda la computación
efectiva. Este rasgo simplifica todavía más a este tipo de robot y
contribuye a su potencial de ubicuidad.
Conclusiones
El
presente capítulo apenas ha analizado la punta del iceberg de qué es un
robot, cómo se puede pensar en este como en un organismo robótico
blando y de qué modo los materiales inteligentes ayudarán a hacer
realidad y revolucionar la robótica del futuro. Por otra parte, se ha
analizado el impacto futuro de la robótica en los humanos, pero lo
cierto es que solo podemos aventurar su magnitud. Del mismo modo que el
impacto de internet y de la World Wide Web
eran imposibles de predecir, no podemos imaginar adónde nos llevará la
robótica futura. ¿Realidad virtual inmersiva? Sin duda. ¿Cuerpos de
recambio? Es probable. ¿Un trastorno total de nuestras vidas y de la
sociedad? ¡Bastante posible! En nuestro discurrir por el camino de la
revolución robótica, cuando echemos la vista atrás recordaremos esta
década como el escenario del verdadero despegue de la robótica, cuando
se sentaron las bases de nuestro mundo futuro.
Bibliografía
—
Albrecht, T., Bührer, C., Fähnle, M., Maier, K., Platzek, D. y Reske,
J., «First Observation of Ferromagnetism and Ferromagnetic Domains in a
Liquid Metal», en Applied Physics A: Materials Science & Processing, vol. 65, n.º 2, 1997, p. 215.
—
Amend, J. R., Brown, E., Rodenberg, N., Jaeger, H. M. y Lipson, H., «A
Positive Pressure Universal Gripper Based on the Jamming of Granular
Material», en IEEE Transactions on Robotics, vol. 28, n.º 2, 2012, pp. 341-350.
—
Bar-Cohen, Y. (ed.), «Electroactive Polymer (EAP) Actuators as
Artificial Muscles – Reality, Potential, and Challenges», 2.ª ed.,
Bellingham, Washington, SPIE Press, 2004.
— BBC News, «Octopus Intelligence: Jar Opening», 25 de febrero de 2003. http://news.bbc.co.uk/1/hi/world/europe/2796607.stm (consultado el 10 de octubre de 2016).
— Cao, W., Cudney, H. H. y Waser, R., «Smart Materials and Structures», en PNAS, vol. 96, n.º 15, 1999, pp. 8.330-8.331.
—
Curie, J. y Curie, P., «Contractions et dilatations produites par des
tensions dans les cristaux hémièdres à faces inclines», en Comptes rendus des hebdomadaires sesiones de l’Académie des Sciences, vol. 93, 1881, pp. 1.137-1.140.
— Haines, C. S., et al.«Artificial Muscles from Fishing Line and Sewing Thread», en Science, vol. 343, n.º 6.173, 2014, pp. 868-872.
— Ilievski, F., Mazzeo, A. D., Shepherd, R. F., Chen, X. y Whitesides, G. M., «Soft Robotics for Chemists», en Angewandte Chemie, vol. 123, n.º 8, 2011, pp. 1.930-1.935.
— Jahromi, S. S. y Atwood, H. L., «Structural Features of Muscle Fibres in the Cockroach Leg», en Journal of Insect Physiology, vol. 15, n.º 12, 1969, pp. 2.255-2.258.
—
Jin, S., Koh, A., Keplinger, C., Li, T., Bauer, S. y Suo, Z.,
«Dielectric Elastomer Generators: How Much Energy Can Be Converted?», en
IEEE/ ASME Transactions On Mechatronics, vol. 16, n.º 1, 2011.
— Keplinger, C., Sun, J. Y., Foo, C. C., Rothemund, P., Whitesides, G. M. y Suo, Z.,«Stretchable, Transparent, Ionic Conductors», en Science, vol. 341, n.º 6.149, 2013, pp. 984-987.
— Kier, W. M. y Smith, K. K., «Tongues, Tentacles and Trunks: The Biomechanics of Movement in Muscular-hydrostats», en Zoological Journal of the Linnean Society, vol. 83, n.º 4, 1985, pp. 307-324.
— Kim, D. H., et al.«Epidermal Electronics», en Science , vol. 333, n.º 6.044, 2011, pp. 838-843.
— Knoop, E., Rossiter, J., «The Tickler: A Compliant Wearable Tactile Display for Stroking and Tickling», en CHI 2015, 33rd Annual ACM, Conference on Human Factors in Computing Systems, vol. 18, 2015, pp. 1.133-1.138.
— Lendlein, A. y Kelch, S., «Shape-memory Polymers», en Angewandte Chemie International Edition, vol. 41, n.º 12, 2002, pp. 2.034-2.057.
— Mather, J. A., «Behaviour Development: A Cephalopod Perspective», en International Journal of Comparative Psychology, vol. 19, n.º 1, 2006.
—
Meller, M. A., Bryant, M. y García, E., «Reconsidering the McKibben
Muscle: Energetics, Operating Fluid, and Bladder Material», en Journal of Intelligent Material Systems and Structures, vol. 25, n.º 18, 2014, pp. 2.276-2.293.
—
Morin, S. A., Shepherd, R. F., Kwok, S.W., Stokes, A. A., Nemiroski, A.
y Whitesides, G. M., «Camouflage and Display for Soft Machines», en Science, vol. 337, n.º 6.096, 2012, pp. 828-832.
—
Pelrine, R., Kornbluh, R., Pei, Q. y Joseph, J., «High-Speed
Electrically Actuated Elastomers with Strain Greater Than 100%», en Science, vol. 287, n.º 5.454, 2000, pp. 836-839.
— Pfeifer, R. y Gómez, G., «Morphological Computation—Connecting Brain, Body, and Environment», International Symposium on Creating Brain-Like Intelligence, en Lecture Notes in ComputerScience, vol. 5.436, 2009, pp. 66-83.
—
Polygerinos, P., Wang, Z., Galloway, K. C., Wood, R. J. y Walsh, C. J.,
«Soft Robotic Glove for Combined Assistance and at-Home
Rehabilitation», en Robotics and Autonomous Systems, vol. 73, 2015, pp. 135-143.
—
Rossiter, J., Winfield, J. y Ieropoulos, I., «Here Today, Gone
Tomorrow: Biodegradable Soft Robots», Electroactive Polymer Actuators
and Devices (EAPAD), Bellingham, Washington, SPIE, 2016.
— Rossiter, J., Yap, B. y Conn, A., «Biomimetic Chromatophores for Camouflage and Soft Active Surfaces», en Bioinspiration & Biomimetics, vol. 7, n.º 3, 2012.
— Rossiter, J. M., Takashima, K. y Mukai, T., «Thermal Response of Novel Shape Memory Polymershape Memory Alloy Hybrids», Actas de SPIE: Behavior and Mechanics of Multifunctional Materials and Composites, Bellingham, Washington, SPIE, 905810, 2014.
— Schokraie, E., et al.«Comparative Proteome Analysis of Milnesium Tardigradum in Early Embryonic State versus Adults in Active and Anhydrobiotic State», en PLoS ONE, vol. 7, n.º 9, 2012.
— Sender, R., Fuchs, S. y Milo, R., «Revised Estimates for the Number of Human and Bacteria Cells in the Body», en PLoS Biology, vol. 14, n.º 8, 2016.
— Shahinpoor, M. y Kim, K. J., «Ionic Polymer-metal Composites: I. Fundamentals», en Smart Materials and Structures, vol. 10, n.º 4, 2001.
—
Tolley M. T., Shepherd, R .F., Mosadegh, B., Galloway K. C., Wehner,
M., Karpelson, M., Wood, R. J. y Whitesides G. M., «A Resilient,
Untethered Soft Robot», en Soft Robotics, vol. 1, n.º 3, 2014, pp. 213-223.
— Winslow, W. M., «Induced Fibration of Suspensions», en J. Appl. Phys, vol. 20, n.º 12, 1949, pp. 1.137-1.140.
— Wu, S. y Wayman, C., «Martensitic Transformations and the Shapememory Effect in Ti50Ni10Au40 and Ti50Au50 Alloys», en Metallography, vol. 20, n.º 3, 1987, p. 359.
-
Rossiter, J., "La robótica, los materiales inteligentes y su impacto
futuro para la humanidad", en El próximo paso. La vida exponencial,
Madrid, BBVA, 2016.